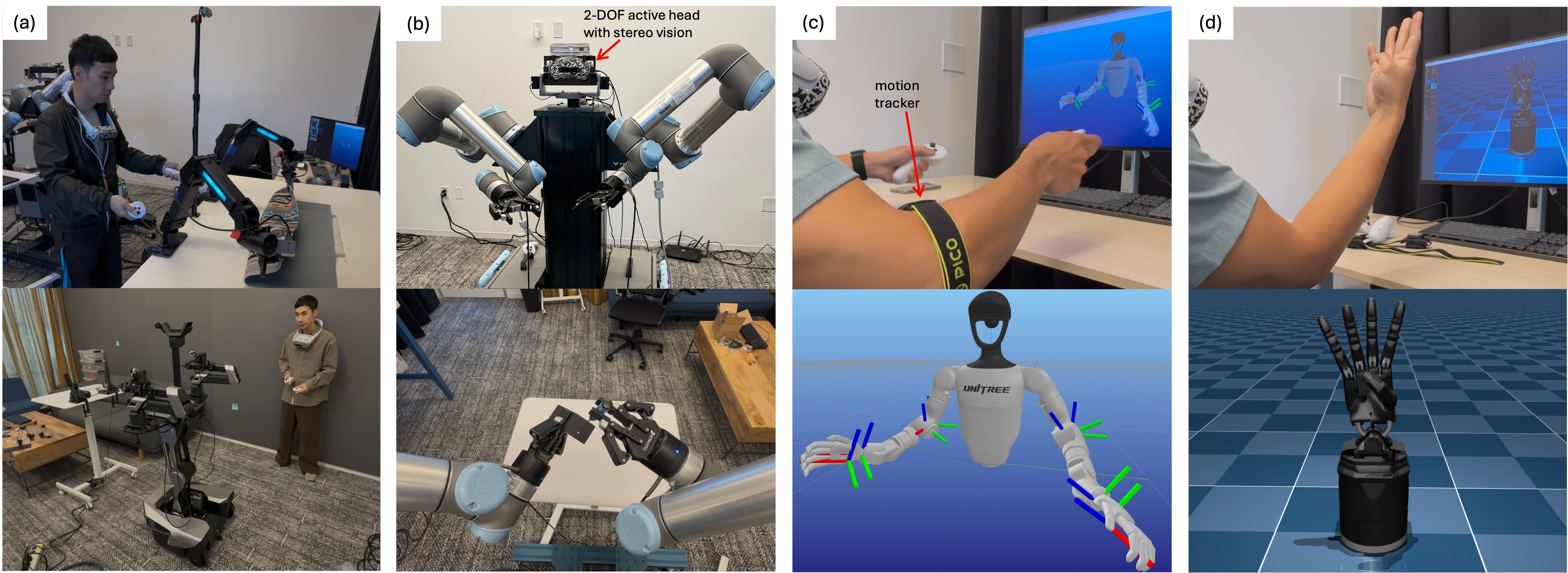
Example applications of XRoboToolkit: (a) teleoperation with XR controllers for dual arm manipulation and mobile manipulators, (b) Dual UR5 manipulators with 2-DOF head tracking and stereo vision, (c) auxiliary motion trackers for robot elbow control in MeshCat visualization, and (d) dexterous hand tracking in Mujoco simulation.
@article{zhao2025xrobotoolkit,
title={XRoboToolkit: A Cross-Platform Framework for Robot Teleoperation},
author={Zhigen Zhao and Liuchuan Yu and Ke Jing and Ning Yang},
journal={arXiv preprint arXiv:2508.00097},
year={2025}
}